|
|
Arany László: Az X-37B katonai robot-űrrepülőgép
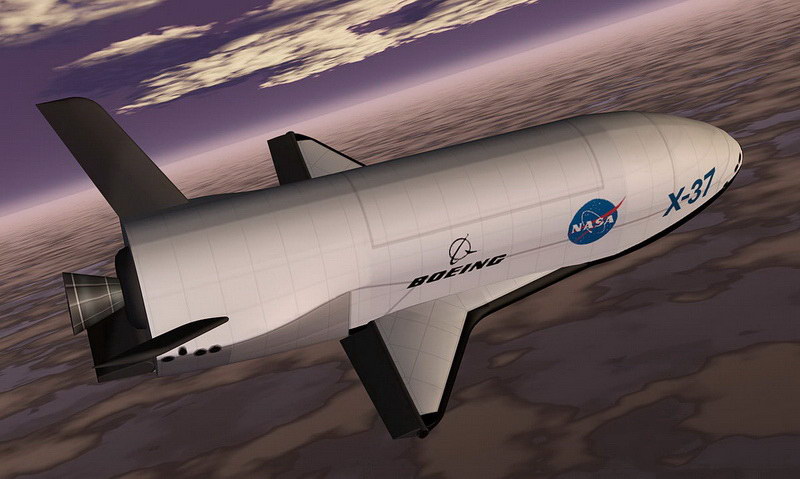
A Boeing
X-37 robot-űrrepülőgépe
Orbitális
Kísérleti Eszköz (OTV)
néven is ismert. Többször felhasználható, személyzet nélküli űreszköz.
Hagyományos hordozórakéta emeli a magasba, visszatérésekor pedig – miután
áthaladt a Föld légkörén - siklórepüléssel közelíti meg a kifutópályát, ahová
repülőgépként száll le. Az
X-37 űrrepülőgépet az
Egyesült Államok Légiereje üzemelteti, céljuk ezzel a berendezéssel a többször
felhasználható űreszközök technológiájának demonstrálása. A Boeing korábbi
X-40-es 120%-ra növelt gépéről van szó.
Rövid áttekintés
A NASA
X-37-es programja
1999-ben kezdődött, majd átkerült az Egyesült Államok Védelmi Minisztériumához
2004-ben. Az első légköri siklásos kísérletet 2006. április 7-én hajtották végre
a Légierő Edwards Bázisán, Kaliforniában. Az űrrepülőgép bemutatkozó repülésére
USA-212 kódszám alatt 2010. április 22-től került sor,
Atlas V
hordozórakéta felhasználásával. A robotgép az év december 3-án tért vissza. Az
út során tesztelték a hővédő pajzsát és a szuperszonikus sebességen való
irányíthatóságát. Egy újabb
X-37-est bocsátottak
fel 2011. március 5-én USA-226 hivatkozási számmal. 2012. június 16-án szállt
le. A harmadik
X-37 küldetést 2012.
december 12 és 2014 október 17 hajtották végre az USA-240 kódszám alatt. A
robotkép Vandenbergi Légirerő Bázison szállt le. A negyedik repülés jelenleg is
tart, 2015. május 20-án kezdődött, USA-261 hivatkozási szám alatt.
Kezdetek
1999-ben a NASA választása a Boeing Integrált Védelmi Rendszerére esett,
megbízták a vállalatot egy orbitális űreszköz megtervezésével és
kifejlesztésével. A végrehajtásra a Boeing kaliforniai telepén került sor, a
Phantom Műveknél. Négy évet átfogó időszak alatt összesen 192 millió dollárt
fordítottak a tervezetre, ebből a NASA állt 109 milliót, a Légierő 16 milliót, a
Boeing pedig 67 millió dollárt. 2002. végén a Boeing további 301 millió dolláros
támogatást nyert el a NASA Űreszköz Felbocsátási Kezdeményezés keretösszegéből.
Az
X-37 aerodinamikai
megoldásait a nagyméretű
Space Shuttle Űrrepülőgép
terveiből vették át, ennek eredményeként az
X-37-nek
nagyjából hasonló a siklószáma, valamivel kisebb azonban nagyobb magasságokban
és magasabb Mach tartományokban, mint a DARPA
Hiperszonikus Technológiai Eszközének.
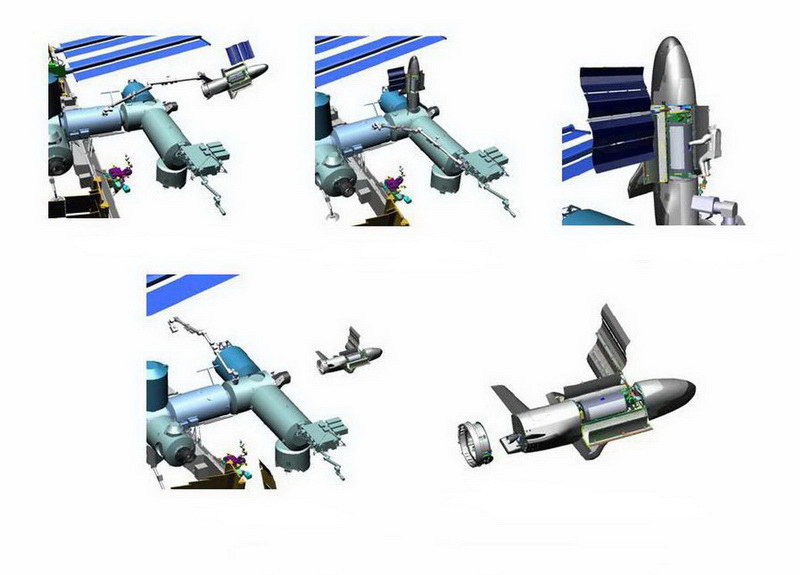
A korai elvárások az
X-37 irányában annak a
képességének az igazolása volt, miszerint meg tud műholdakat közelíteni és
kijavítani rajtuk az esetleges meghibásodásokat. Az eredeti elképzelések szerint
az X-37-est
az Űrsikló
rakodóterében vitték volna fel, ám a
Delta-IV,
illetve valamely vele összemérhető hordozórakéta hozzávetőleges áttervezését
követően megállapították, hogy az
Űrsikló alkalmazása e
célra gazdaságtalan lenne.
Az
X-37 átkerült a
NASA-tól a Védelmi Minisztérium Kutatási Projekthivatalához (DARPA) 2004.
szeptember 13-án. Ezt követően titkosították. A DARPA támogatta az
X-37
tervezetet, mint az Egyesült Államok Védelmi Minisztériumának NASA-tól független
űrpolitikája megteremtésének egyik elemét – a Challenger 1986-os katasztrófáját
követően.
A Boeing Vállalatról
Az
X-37B gyártója a Boeing
Network & Space Systems, pontosan ugyanaz a cég, amely kommunikációs-,
navigációs-, felderítő- és időjáráskutató mesterséges holdakat tervez és bocsát
fel. Jelen állás szerint mindösszesen két darab
X-37B
robot-űrrepülőgépet építenek. Az
X-37B projektre
vonatkozó adatok titkosak (pl. a költségvetése, a vele foglalkozó alkalmazottak
száma), csak az tudható, hogy a megvalósításra a Boeing kaliforniai telepein
került sor, Huntington Beachben, illetve El Segundoban.
Légköri siklásos kísérletek
3.
ábra.
Az X-37B
űrrepülőgép az
Atlas V hordozórakéta
csúcsán.
A légköri siklásos kísérletekhez használt berendezés nem
rendelkezett hajtóművel. A kész, bevethető gép rakodótérajtajai helyett ennél az
eszköznél a törzs felső részét lezárták és szerkezetét megerősítették, hogy
csatlakoztatni lehessen szállító repülőgépéhez. 2004. szeptemberében a DARPA
bejelentette, hogy a légköri siklási kísérleteket eleinte a
Scaled Composite
White Knight nagy-magasságú
hordozó-repülőgépének felhasználásával végzik.
2005. június 21-én befejezték az
X-37A
robotrepülőgéppel a rögzített állapotú siklási kísérletek első sorozatát a
kaliforniai székhelyű Mojave Űrkikötőben. 2005. második felében az
X-37A
szerkezeti korszerűsítéseken esett át, többek között az orrfutóját is
megerősítették. További függesztett tesztsorozat kezdődött és az első szabad
siklásos kísérletet is végrehajtották 2006. február közepén. Az
X-37
első nyilvános szabad siklásos bemutatóját 2006. március 10-re tervezték,
azonban végül törölték ezt a dátumot a viharos erejű északi szél miatt.
Hasonlóképpen járt a március 15-re tervezett bemutató is.
2006. március 24-én ismét szabad siklásos repüléshez
készülődtek, ám egy adatátviteli hiba megakadályozta a kioldást, ezért a
robotgép a White Knight
szállítórepülőhöz rögzítetten szállt le. 2006. április 6-án végre sor
kerülhetett a szabadsiklásos repülésre, ekkor azonban a leszállás közben a gép
túlszaladt a kifutópályán és kisebb károk keletkeztek benne. A javítások miatt
rövidebb leállás következett, ezalatt a program végrehajtása átkerült Mojavéből
a Légierő 42-es Telepére (KPMD), a kaliforniai Palmdale-be, a repülési
kísérletek hátralévő részének befejezésére. Mivel a
White Knight
székhelye Mojave,
ezért átszállították a szükséges időtartamra a 42-es Telepre,
ahol a repüléseket végre kívánták hajtani. Öt további bevetésre került sor, ezek
közül kettő során a robotgépet kioldották és az sikeresen le is szállt. E két
kísérletek dátuma 2006. augusztus 18. és szeptember 26.
Az
X-37B
Orbitális
Kísérleti Eszköz
2006. november 17-én a Légierő bejelentette, hogy kifejleszti saját változatát a
NASA X-37A robotgépét illetően. A
Légierő változata az
X-37B Orbitális
Kísérleti Eszköz (OTV) nevet
kapta. Az OTV program a NASA, a DARPA
és a Légierő által korábban elvégzett ipari és kormányzati munkálatokra épül, az
irányítása pedig a Légierő Gyors Reagálású Hivatalához tartozik, partneri
együttműködésben a NASA-val és a Légierő Kutató Laboratóriumával. A Boeing
Vállalat az OTV program
fővállalkozója. Az
X-37B-t úgy
tervezték, hogy akár 270 napot is képes legyen a világűrben tölteni egyetlen
útja során. A Légierő titkársága annyit hozott nyilvánosságra, hogy az
OTV program a „kockázatok
csökkentésére, a kísérletezésre és a többször felhasználható eszközök
fejlesztési technológiájának pontosabb elméleti kidolgozására koncentrál, a
hosszú időn át a világűr hatásának kitett űreszközök hatékonyabb
kifejlesztésének érdekében.”
Az
X-37B az eredeti tervek szerint az
Űrrepülőgép
rakodóterében emelkedett
volna a magasba, ám a
Columbia
űrrepülőgép 2003-as tragédiája
következményeként a
Delta-II
hordozórakétára esett a választás. A tervek áttekintését követően azonban
átkerült az Atlas V
hordozórakéta
orrkúp nélküli változatára, ám az újabb elemzések azt mutatták, az orrkúp
nélküli változatnál aerodinamikai problémák merülhetnek fel a kilövés során. A
küldetés végrehajtását követően a robotgép a Légierő Vandenbergi kifutópályájára
száll le, alternatívaként pedig a Légierő Edwardsi bázisa szerepel. 2010-ben
megkezdődtek a munkálatok egy második
X-37B, az
OTV-2 robotgép
megépítésére, amely végre is hajtotta első repülését 2011. márciusában.
2014. október 8-án a NASA bejelentette, hogy a korábbi elképzelésekkel
ellentétben, az
X-37B robotgép a
Kennedy Űrközpontban kerül elhelyezésre, egészen pontosan az Orbiter
Összeszerelő Létesítmény 1-es és 2-es számú hangárjában, melyeket korábban az
Űrrepülőgépek
foglaltak el. A Boeing
bejelentette, a robot-űrrepülőgépek az OPF-1-et használják 2014. januárjában.
Korábban a Légierő is fontolóra vette, hogy az
X-37B
robotgépekkel kapcsolatos
műveleteket tartósan át kellene helyezni a kaliforniai, Vandenbergi
Légibázisukról a kilövéshez, a Kennedy Űrkikötőhöz közelebbi helyszínre. A NASA
azt is bejelentette, a program során elvégezték a megfelelő teszteket annak
igazolására, hogy az X-37B képes használni a korábbi
Űrrepülőgépek
leszállását biztosító
kifutópályákat is. A NASA továbbá azt is közölte, a két hangár karbantartási
munkálataival 2014. második felére végeznek, az OPF-1 ajtajára felfestik akkorra
az „X-37B
otthona” feliratot.
Az
X-37B-vel kapcsolatos legtöbb
tevékenység titkos. A Légierő egyik tisztjének állítása szerint a tervezet
„kísérleti teszt-program annak igazolására, hogy megbízható, többször
felhasználható, automatikus, világűri bázisú teszt-platformot lehessen
megépíteni az Egyesült Államok Légiereje számára. Az
X-37B elsődleges célja kettős: többször felhasználható űrtechnológia
megteremtése, valamint a Földre visszahozható operatív technológiák alkalmazása.
A Légierő szerint ezek a területek felölelik az avionikát, a repülési
rendszereket, az irányítási- és navigációs területeket, a hővédelmet, a
szigetelést, a meghajtást és a visszatérő rendszereket.
Elképzelések a fejlesztési célokról
2010-ben Tom Burghardt a Space Daily részére írt cikkében felveti, az
X-37B
használható kémműholdként, de
fegyvereknek a világűrbe történő szállítására is. A Pentagon következetesen
tagadja azon állítások valódiságát, miszerint az
X-37B világűri bázisú fegyverek kifejlesztését szolgálná. 2012.
januárjában hírek láttak napvilágot azzal kapcsolatban, hogy az
X-37B a kínai
Tiangong-1 űrállomás közelében végez felderítő tevékenységet.
Tervek
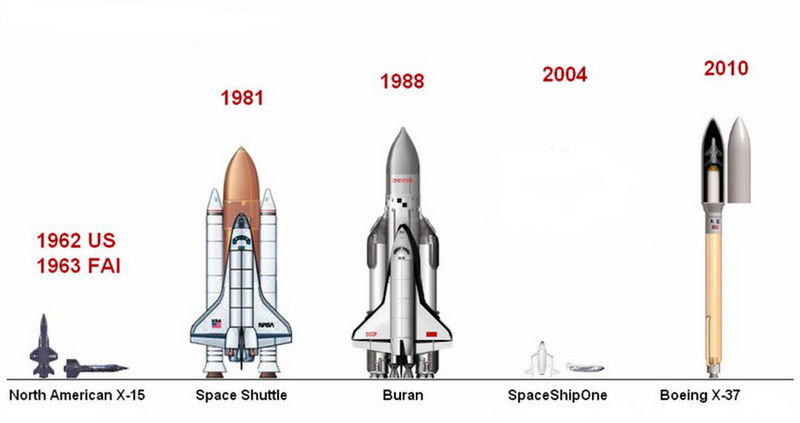
Az
X-37 első repülésékor ez volt az
eddig valaha repült legkisebb és legkönnyebb, bevetésre kerülő, orbitális
űrrepülőgép. Mind az amerikai
X-15,
mind a SpaceShipOne
szuborbitális
berendezések voltak. A mellékelt ábrán látható űrrepülőgépek közül csupán az
X-37
és a
Burán hajtott végre automatikus, személyzet-nélküli orbitális
repülést.
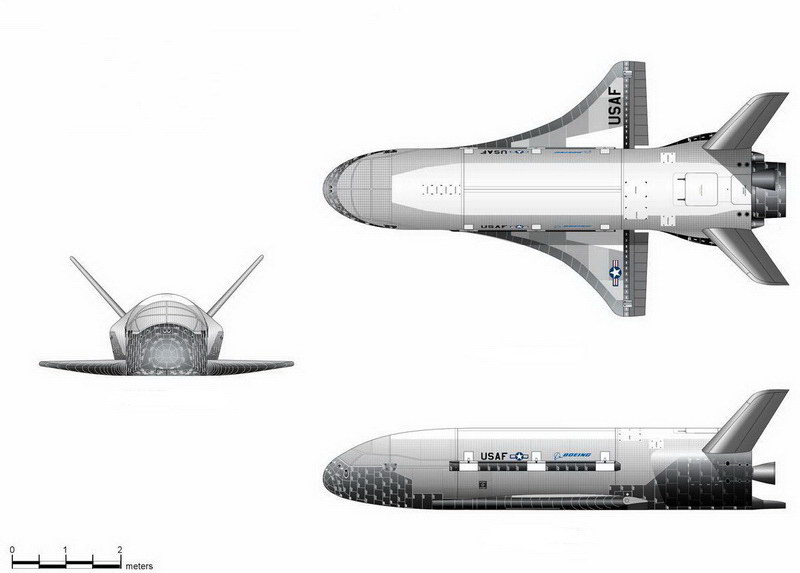
Az
X-37 Orbitális Kísérleti Eszköz
többször felhasználható, deltaszárnyas robot-űrrepülőgép. 120%-ra növelt
változata a Boeing X-40-es gépének. Hossza 8.8 méter, két, egymáshoz képest
hegyesszöget bezáró kicsiny szárnya van a farára rögzítve. A felbocsátását egy
Atlas V 501
hordozórakéta végzi,
Centaur
második fokozatta. Az
X-37-est úgy tervezték, hogy
visszatérésekor, 25-szörös hangsebesség mellett is képes legyen manőverezni.
Az
X-37 robotgéppel különböző
technológiákat kívánnak demonstrálni, többek között a korszerűsített hővédelmi
rendszert, a modernizált automatikát, az önálló repülésirányító rendszert és a
törzs megépítésekor felhasznált anyagokat. Az
X-37 űrrepülőgép hővédelmi rendszere korábbi generációs űrhajók
visszatérő egységeinek hővédelmére épül, beleértve a szilikon-alapú kerámia
csempéket is. Az avionikai csomagját a Boeing a
CST-100, pilótás űrhajójához fejlesztették ki. A NASA megfogalmazása
szerint az X-37
segíteni fog a
tervezési és fejlesztési munkák tekintetében a NASA
Orbitális Űrrepülőgépe
tekintetében. A
berendezést a Nemzetközi Űrállomás személyzettel történő ellátására-, illetve
mentőhajóként való működtetésére szánják.
Az
X-37 meghajtásáról egy Aerojet
AR2-3 hajtómű gondoskodik, hajtóanyagát a gép fedélzetén tárolják. Tolóereje
29.341 kN. Az emberméretű AR2-3 hajtóművet a hibridhajtóműves NF-104A, űrhajósok
kiképzését szolgáló repülőgépben alkalmazták eredetileg, használatára
vonatkozóan az engedélyét megújították, és így már bekerülhetett az
X-37-be, ahol hidrogén-peroxid/JP-8
keverékkel működik.
Az
X-37 az orbitális pálya elhagyását
követően teljesen automatikus leszállást hajt végre, s ezzel a képességével
csupán második a Szovjet Burán űrrepülőgép mögött. Az
X-37
egyben a legkisebb és legkönnyebb
űrrepülőgép az eddig alkalmazottak sorában, tömege kis híján 5000 kg, méretét
tekintve pedig nagyjából negyedrésze az
Űrrepülőgépnek. 2013-ban a Guiness Rekordok Könyvébe is bekerült, mint a
világ legkisebb orbitális űrrepülőgépe.
Az Űrrepülési Alap 2015. április 13-án az
X-37 számára ítélte meg a 2015-es Világűri Fejlesztések Díját, „a
többször felhasználható űreszközök fejlesztése terén elért jelentős előre
lépésért, a vele orbitális pályán végrehajtott műveletekért, a fejlesztésért, a
tervezésért, valamint az
X-37B-vel
végrehajtott három repülésért, melyek együttes hossza 1367 nap.” A díjátadás
helyszínéül a 31. Űrszimpózium szolgált, Colorado Springsben.
Eddigi küldetések
OTV-1, USA-212
Az
OTV-1 2010. december
3-án baj nélkül földet ért a Légierő Vandenbergi Bázisának kifutópályáján, így
ért véget sikeres repülése. Az
OTV-1, vagyis az első
X-37B,
első útjára egy
Atlas V hordozórakétán
indult a Cape Canaverali Légierő Bázisról 2010. április 22-én, világidő szerint
éjfél előtt két perccel. A robot-űrrepülőgép sikeresen pályára állt, hogy
elvégezzék vele és általa az előre eltervezett feladatokat. Habár a Légierő
megadta a gép pályájának néhány adatát, amatőrcsillagászoknak ugyancsak sikerült
megtalálniuk a Föld körül keringő robotgépet és meghatározni annak pályáját,
amit aztán meg is osztottak. A világszerte elérhető adatbázis alapján 2010.
május 22-én a robot-űrrepülőgép 39.99 hajlásszögű pályán keringett, 90 perc
alatt tett meg egy fordulatot a 401 x 422 km magas ellipszisen. Az
OTV-1
négynaponként haladt át a Föld bizonyos pontjai felett, 410 km-es átlagos
magasságban, mely tipikusnak tekinthető katona felderítő műholdak estében. Ez a
pálya gyakori civil alacsony-pályás műholdak esetében is, ugyanebben a
magasságban kering a Nemzetközi Űrállomás és a legtöbb pilótás űrhajó. Az
X-37-es
pályagörbéje 2010. novemberére 281 x 292 km-esre szűkült.
A légierő az év november 30-án bejelentette, hogy az
OTV-1
valamikor december 3 és 6 között fog visszatérni a Földre. A terveknek
megfelelően, a robot-űrrepülőgép elhagyta a földkörüli pályát, belépett a Föld
légkörébe és sikeresen leszállt a Légierő Vandenbergi Bázisán december 3-án,
9.10-kor, világidő szerint, végrehajtván az Egyesült Államok első, kifutópályára
történő, automatikus űrrepülőgépes leszállását. A történelem folyamán ez volt a
második alkalom, az első a szovjet
Burán
űrrepülőgéphez köthető, 1988-ban. Az
OTV-1
mindösszesen 224 napot töltött a világűrben. Leszállás közben egyik kereke
defektet kapott, minek következtében a gép alján kisebb kár keletkezett.
Mivel a küldetés titkosított, annak céljáról és
tartalmáról leginkább csak találgatások állnak rendelkezésünkre. James Oberg
szakújságíró álláspontja szerint bizonyára van kapcsolat az
X-37
repülése és a Légierő
Hiperszonikus Technológiai Demonstrátora
(HTV-2)
között. A program része lehetett annak vizsgálata, vajon az
X-37-es miként
képes detektálni egy feléje irányuló támadást és megtenni a szükséges védelmi
intézkedéseket. A HTV-2-es 2010.
április 22-én, 23.00-kor bocsátották fel – világidő szerint – azaz csupán 58
perccel az
X-37B startja előtt. Szuborbitális repülése
azonban kudarcba fulladt 25 perccel indítását követően.
William Scott, az Aviaton Week & Space Tehnology korábbi
irodavezetője úgy véli, az
X-37 segítségével
alacsony földkörüli pályáról alkalmazható fegyverek tesztelését végzik. Hangot
ad azoknak a spekulációknak is, miszerint az USA az
X-37
segítségével kívánja feléleszteni űrfegyverkezési programját.
OTV-2, USA-226
Az
OTV-2 az
AV-026
katalógusszámú
Atlas V rakéta orrán
emelkedett a magasba 2011. március 5-én a Cape Canaverali Légierő Bázis 41-es
indítóállásából. Az indítást eredetileg egy nappal korábbra tervezték, ám
időjárási problémák megakadályozták azt. A felbocsátást az Egyesült Felbocsátási
Szövetség hajtotta végre.
Mielőtt az
X-37 robotűrhajót az
Atlas V-re
erősítették volna, a hordozórakétát kivitték a startállványra és esős indítási
kísérletet hajtottak vele végre 2011. február 4-én. Ezt követően másnap
visszavitték a Függőleges Összeszerelő Csarnokba, és elvégezték az utolsó
simításokat.
A repülésre vonatkozó legtöbb adatot nem hozták nyilvánosságra. A Légierő
előzetesen annyit árult el, hogy a repülés időtartama a fedélzeten végzendő
kísérletek állásától függ. 2011. november 29-én a Légierő titkárságának
szóvivője bejelentette, a repülés időtartamát meghosszabbítják a tervezett
élettartamon túli időtartamra, az éppen zajló kísérletek folytatása miatt.
Az
X-37 hasznos terhét
ugyan nem ismerjük, de az biztosra vehető, hogy rakterében összehajtogatott
állapotú napelemet is szállított, annak érdekében, hogy a robotűrhajót
energiával lássa el másfél éves küldetése során.
Az
X-37 ez alkalommal
átlagosan 325 km magas elliptikus pályán keringett.
A küldetését befejezvén a robotűrhajó letért a pályájáról,
belépett a légkörbe és leszállt a Légierő Vandenbergi Bázisán 2012. június 16-án
– helyi idő szerint – a hajnali órákban. Az
OTV-2
volt a harmadik űrrepülőgép, mely teljesen automatikus leszállást hajtott végre
a szovjet
Buránt, és saját testvérgépét, az
OTV-1-et
követően, 469 napos űrrepülés után.
OTV-3, USA-240
A Boeing
X-37B jelű
robot-űrrepülőgépének második repülése 2012. december 11-én kezdődött. Ugyancsak
egy Atlas V rakéta
csúcsára erősítve. A Légierő illetékese elmondta, hogy „a küldetés során
tanulmányozni kívánják, hogy az X-37B
miként
viselkedik immár második útja során, az
OTV-1
repülését követő felújítási munkálatok hogyan válnak be. Mivel pedig az
X-37B
program egyik legfontosabb célja a megfizethetőség és a megbízhatóság
kidolgozása a többször felhasználható eszközök esetében, az újra és úja
megismételt tesztek létfontosságúak a munka során. Kíváncsian várjuk, miként fog
a robotrepülőgép viselkedni a második útja során.” – nyilatkozta
Richard
McKinney, aki helyettes államtitkár a Légierő Űrkutatási Osztályán.
A startot eredetileg 2012. október 25-re tervezték, az
Atlas V
hordozórakéta hajtóművének problémája miatt azonban el kellett azt halasztani. A
robot-űrrepülőgép végül december 11-én szállt fel Cape Canaveralból. 43.5 fokos
hajlásszögű, átlagosan 325 km-es ellipszispályáján keringve 2014. márciusában
megdöntötte a korábbi repülési időtartamot, a visszatérésére végül a Vandenbergi
Légitámaszponton került sor 2014. október 17-én majdnem 675 napos küldetést
követően. A küldetés másfél éves időtartama még egyes szakértőknek is
meglepetéssel szolgált. A robot-űrrepülőgép leszállását jóval korábbra jósolták.
OTV-4, USA-261
Az újabb robot-űrrepülőgépes küldetés 2015. május 20-án
kezdődött. Az
Atlas V hordozórakétát
használták ez alkalommal is. A második
X-37B
robotgép második útjára került sor. A repülés egyik legfontosabb célja a
Hall-effektus tesztelése az Extrém Magas Frekvenciákat alkalmazó kommunikációs
műholdprogram keretében, a NASA-val együttműködve pedig különböző anyagokat
kívánnak vizsgálni űrbéli körülmények között. Tesztelni kívánnak egy kísérleti
meghajtási technikát, a Légierő Kutatólaboratóriuma és a Rakéta Rendszerek
Központjának közös fejlesztését. A küldetés legalább 200 napos lesz.
„Az első három sikeres repülés befejeztével figyelmünket immár a kezdeti, a
rendszerek és berendezések ellenőrzésének és megbízhatósági tesztjeinek
elvégzését követően, a kísérleti- berendezések és anyagok vizsgálatának
szentelhetjük” – nyilatkozta Randy Walden, a Légierő Gyors Reagálású Hivatalának
igazgatója, a fellövést megelőző sajtótájékoztatón. „Nagyon elégedettek vagyunk
a jelenlegi, immár a negyedik OTV küldetés számára összeállított kísérleti
berendezésekkel” – tette hozzá. „Szeretnénk továbbfejleszteni a robotgép
teljesítményét, emellett szívesen látjuk az együttműködésekben született
kísérleti elrendezéseket, hiszen biztosak lehetünk abban, hogy ezek segítenek
magasabb szintre emelni az űrtechnológiát.”
Az
X-37B robotrepülőgép
továbbfejlesztési lehetőségei
Az
X-37B
nem jelenti
feltétlenül a végállapotot a Boeing Vállalat űrrepülőgép-fejlesztésének terén,
hiszen a Légierő bejelentette igényét nagyobb méretű ismételten felhasználható
eszközre is. Ennek már képesnek kell lennie jelentősebb méretű rakományok
szállítására, csatlakozni a Nemzetközi Űrállomáshoz, és akár űrhajósokat is
szállítani. Arthur Grantz a Boeing Space and Intelligence Systems főmérnöke
beszélt erről nemrégiben egy Repülési és Űrhajózási konferencián: „Valamennyi
autonóm irányítási és navigációs rendszert sikerrel leteszteltük, továbbá az
aerodinamikai és hővédelmi rendszereket is.” Azt is elmondta, hogy „Az orbitális
pályáról való letéréshez, a légkörön való áthatoláshoz és magához a
leszállásához semmiféle külső beavatkozásra nem volt szükség. A
robot-űrrepülőgép ismételt elindításához kevesebb idő szükséges még az elvártnál
is, a többször felhasználható rendszerek ugyanis ennyire jól szerepeltek.”
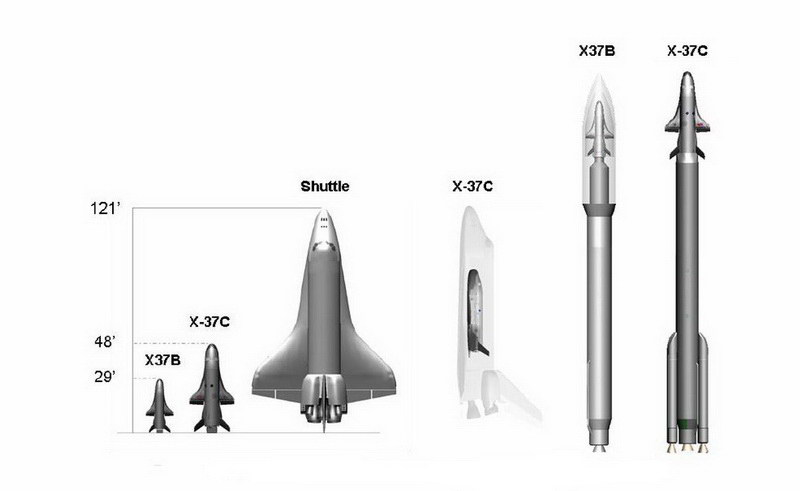
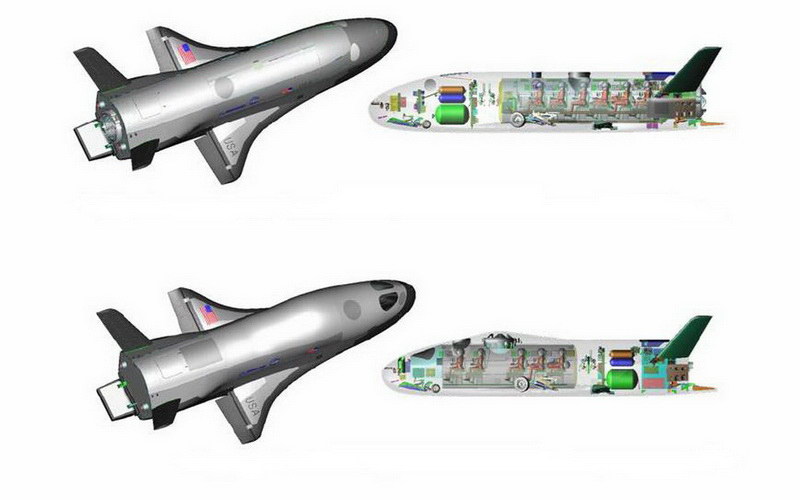
Habár az
X-37B
úgy fest, mint az
Űrrepülőgép kicsinyített változata, valójában annál jelentősen kisebb méretű,
hiszen akár két darab is elférne a „nagytestvér” rakodóterében. A Légierő által
megadott adatok szerint hossza 8.8 méter, szárnyainak fesztávolsága 4.5 méter.
Tömege a fellövéskor közel 5 tonna.
Még a tervezett, a jelenleginél bő másfélszer nagyobb
X-37C is simán
beférne az évekkel ezelőtt nyugdíjazott
Űrrepülőgép
rakterébe. A Boeing tervezőasztalain számos robot- és pilótás űrrepülőgép terve
készül folyamatosan, jövőbeni küldetések lebonyolítására. Grantz beszámolt
arról, hogy az
X-37B is képes
műholdakat indítani kísérleti berendezésekkel a fedélzetén, alacsony-, közepes-
vagy akár geoszinkron pályára is. Alacsony földkörüli pályára szabadon repülő
kísérleti platformokat is kihelyezhet, majd ezeket befoghatja és visszahozhatja
a Földre.
Fontos űrhajózási- és a bolygó biztonságát érintő kísérletre is sor került:
„Sikerült demonstrálnunk a földközeli objektumok háromdimenziós
feltérképezésének lehetőségét. Ez igen fontos pont a veszélyes aszteroidák
megfigyelése terén.”
Az Űrrepülőgépek nyugdíjazásának kérdését érintve Grantz
kijelentette: „Jelenleg az
X-37B az egyetlen
űreszköz, amely képes lágy, 1.5 g terhelés alatt történő visszatérésre, ami igen
fontos a Nemzetközi Űrállomásról visszahozandó, érzékeny anyagok tekintetében.
Az X-37B
egyben képes nagyértékű szállítmányok fel- és visszajuttatására is.” Ilyenek
például biológiai minták, vagy tudományos céllal elvégzett kristálynövesztési
kísérletek végtermékei. Ezek a minták megsérülhetnek a jelentős fékerők
fellépése miatt, ha a jelenleg használt teherszállító űrhajókat vesszük
tekintetbe. „Az ilyen jellegű minták azonnal eltávolíthatók az
X-37B
rakodóteréből a leszállását követően, már a kifutópályán.”
„Semmilyen új technológiai megoldás nem szükséges ahhoz,
hogy az X-37B-t
alkalmassá tegyük a
Nemzetközi Űrállomáshoz
való dokkolásra. A következő lépés azonban egy nagyobb
méretű eszköz kifejlesztése, jelentősebb méretű rakományok visszaszállítása
érdekében, alacsony terhelés mellett.”
Grantz további újdonságokkal is szolgált: „Számos űrrepülőgép terv áll
rendelkezésünkre tervezőasztalainkon. Ezek közül kerül majd ki az, amely
potenciális lehetőségként jöhet szóba űrhajósok alacsony földkörüli pályára
szállítására. A tervek tartalmaznak nyomás alá helyezett rakodóteret, illetve
olyant is, amelynél erre nincs szükség – az ISS vonatkozásában. Lehetséges
hasznos teherként szóba jöhet Bigelow űrmoduljainak feljuttatása, illetve
űrturisták szállítása alacsony földkörüli pályára.”
A nagyobb méretű
X-37C
akár 5-6 űrhajóst is képes a befogadni a fedélzetére, oly módon, hogy közülük
akár az egyik sérült is lehet, aki gyors orvosi ellátást igényel a Földön. Az
X-37C az
űrhajósokat a rakodóterében elhelyezett, nyomás alá helyezett modulban
szállítaná. Az ülések sorban, egymás mögött helyezkednének el, oldalt elegendő
szabad helyet hagyva mellettük. Felbocsátásához megnövelt teljesítményű
Atlas
hordozórakétát használnának. Ez az űrrepülőgép képes lenne űrrandevú
végrehajtására, elhagyni a földkörüli pályát és teljesen automatikus módban
leszállni. E lehetőség mellett azonban az űrpilóta is folyamatosan ellenőrizheti
a repülés minden mozzanatát.
„Amennyiben alkalmassá tesszük pilótás repülésre, ez az
űrhajó képes lesz asztronautákat és/vagy hasznos terhet szállítani a
Nemzetközi
Űrállomásra, onnan sokkal lágyabb visszatérést
te sz lehetővé, közönséges kifutópályára, ami újabb lökést adhat az űrturizmus
elterjedéséhez." - zárul Grantz beszámolója.
Talán már néhány hónap múlva választ kaphatunk rá, melyik
űrrepülőgép megépítését fogja a Légierő támogatni, az
X-37C-t
vagy valamelyik másikat.
Lezárva: 2015. június 17. Források: space.com |
|
|
|